Segling är en teknisk sport.
Och det är lätt att tekniken tar all tid och energi utan att få de resultat man vill.
Just autopiloter är ett sådant område, där det är svårt att på förhand avgöra vad man behöver. Och hur man skall åstadkomma det.
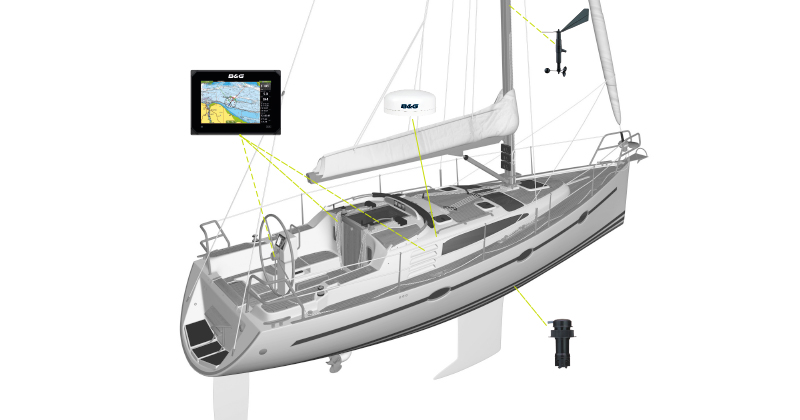
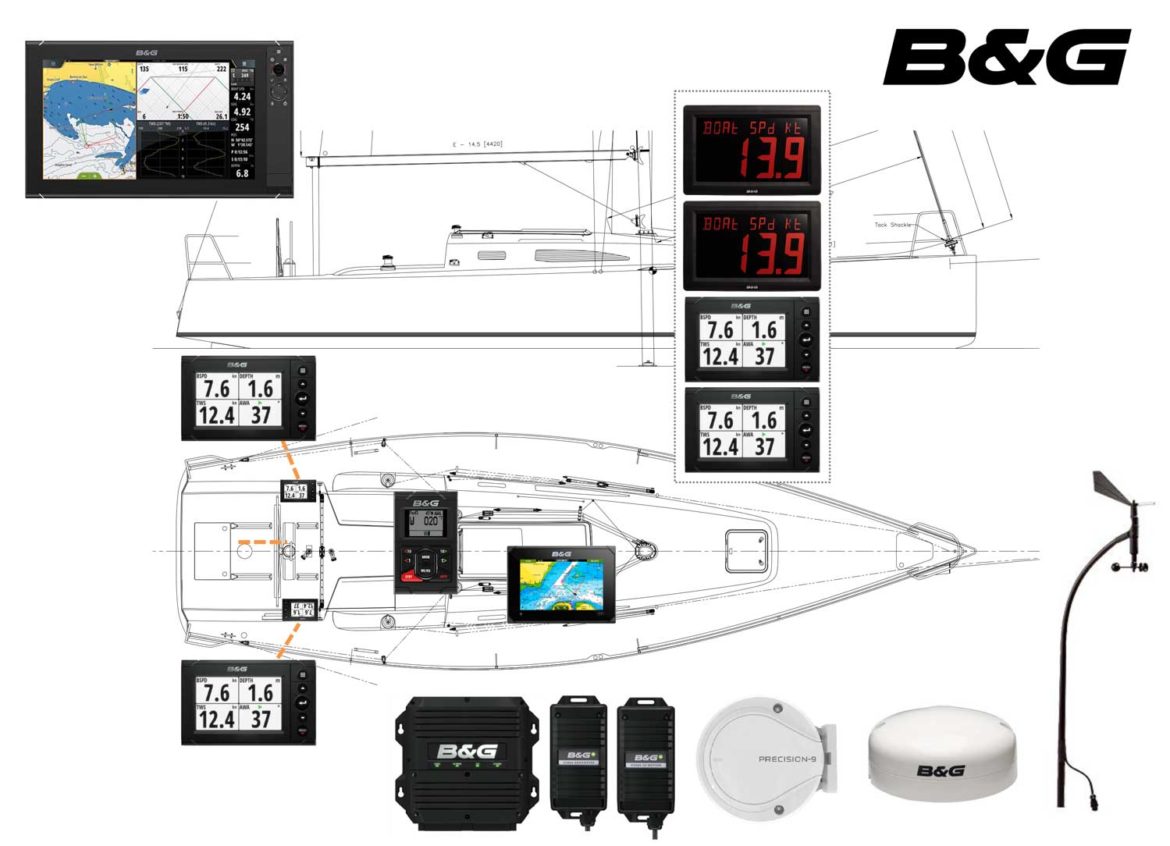
På senare år så har vi sett ett antal riktigt bra integrerade varianter från framförallt Raymarine, men när jag valde autopilot till Blur 2012, så blev NKE det naturliga valet. Eftersom jag körde Nexus instrument, så kunde jag lika gärna välja något som man visste fungerade bra. Och 1000-tals franska soloseglare kan inte ha fel?
Så då fick jag en NKE Gyropilot installerad i Frankrike. Drivenheten blev en Raymarine linjär, då denna var vanlig bland soloseglarna och något som man skulle kunna få service på varsomhelst. Jag hade haft hydraulik på J/109 och var sugen på det lägre motstånd som denna enhet skulle ge då den var standby.
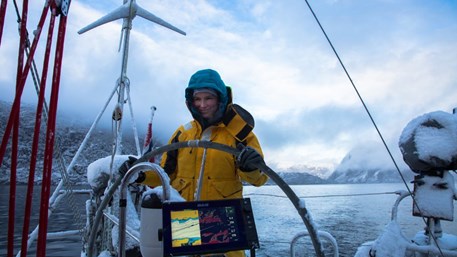
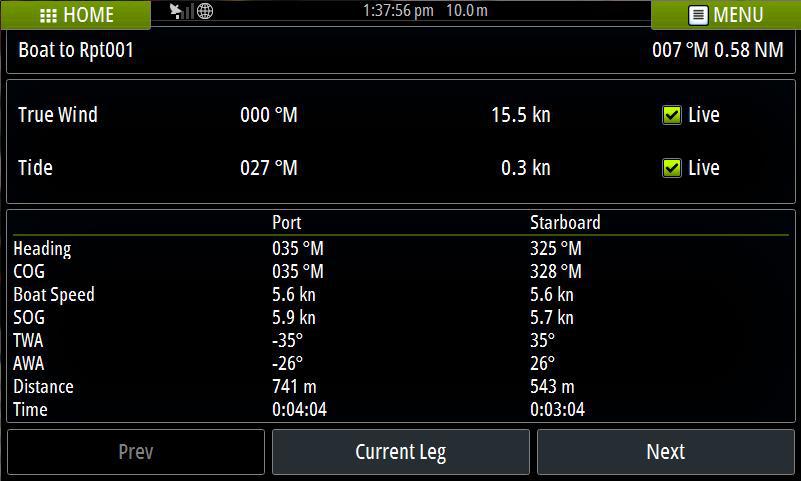
Ganska snart blev det tydligt att GyroPiloten var mycket kompetent, men krävde ganska mycket anpassning och justering för olika förhållanden (av Gain, Counter helm, Helm coefficient & Wind smoothing). Rådet från experterna var att ”bli ett med autopiloten” och att det inte fanns några enkla regler.
Vad som också störde mig lite var att det fanns olika varianter av mjukvaran, så när jag klev ombord på en Class 40 så hade de oftast en egen, lite mer avancerad, version…